The Kilobots laboratory of Complex Systems (KiCS)
Welcome to the home page of the Kilobots Laboratory of Complex Systems . We are planning to employ novel swarm robotics techniques developed at Harvard university to investigate how the mobility properties of diffusing agents is influenced by complex and strongly confining landscapes. Or goal is to build a network of analogies around the central theme of mobility-complex landscape interplay. Potential applications of our research range from cell biology to urban and social sciences.
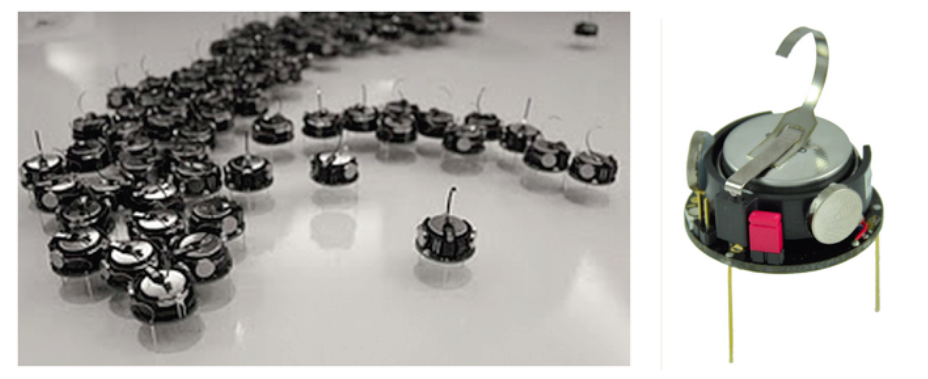
Kilobots offer the unprecedented possibility of reproducing at a macroscopic scale diffusion/ collective dynamics of many agents in hyper-complex environments, potentially relevant to fundamental problems e.g. in cellular biology and in many other contexts, such as social or urban sciences (besides endless fun!).
The main idea and the leitmotiv at KiCS will be to investigate general-purpose scenarios, whose relevance transcend specific fields of science and for which we still lack a detailed understanding and viable analytic models. These may include, among others:
-
Escape problems
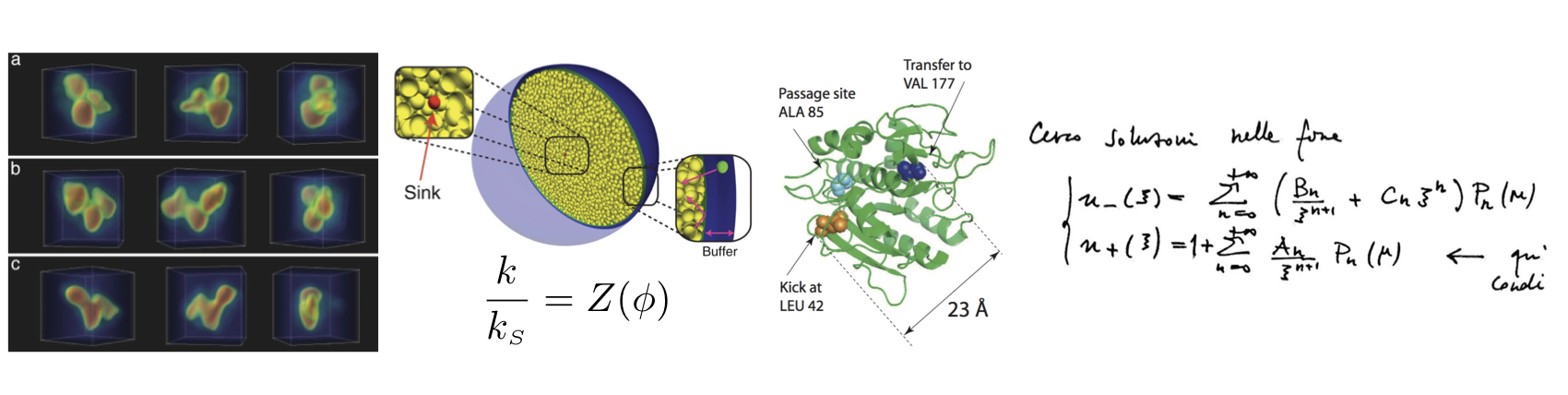
A system of particles/Kilobots leaving a closed space of assigned topology (shape of the containing walls, specific configuration of fixed obstacles and/or moving or inert crowding agents) through a single aperture of given size. This problem is a fundamental one in cellular biology, for example, where proteins diffuse all the time through the different cellular compartments and membranes. However, the same problem also applies many other situations, such as the dynamics of a crowd trying to stampede out of a building in panic through security doors that should be placed at key positions.
-
Encounter problems
One of the fundamental open problems in cellular biology is to understand how two given biomolecules specifically diffuse towards each other to react (bind) in a most crowded (about 40 % of the available volume is occupied by all sort of other molecules) and confining (membranes, compartments) environment. The flux of people in a large supermarket (full of confining aisles and fellow consumers) looking for specific product on the shelves is another hot problem within the same class, even though for obviously different reasons.
-
Active diffusion
It is extremely interesting (and even reasonable in certain contexts) to assume that individual particles diffusing in a given environment do not simply perform a random walk (diffusion), but are also guided by an internal decision framework (that could be random as well). This could include, for example, specific rules to adopt when bouncing on certain types of obstacles or when sensing an over-crowded environment around. While this sort of scenarios are rather difficult to simulate through conventional molecular dynamics or agent-based algorithms on a computer, their implementation would become rather straightforward and very flexible at KiCS, in view of the possibility to program the Kilobots and assign them specific rules beyond simple random walk.